엔비디아(www.nvidia.co.kr, CEO 젠슨 황)는 GTC 2022 키노트에서 안전성을 높이는 동시에 최고 수준의 자율성을 실현하도록 설계된 멀티모달 매핑 플랫폼인 엔비디아 드라이브 맵(NVIDIA DRIVE Map)을 공개했다고 4일 밝혔다. 이는 딥맵(DeepMap) 실측 지도의 정확성과 AI 기반 크라우드 소싱 지도의 최신성과 규모를 결합한 플랫폼이다.
카메라, 라이더, 레이더의 3가지 위치 식별(localization) 레이어를 갖춘 드라이브 맵은 최첨단 AI 드라이버에 필요한 다중성(redundancy)과 범용성을 제공한다. 드라이브 맵은 2024년까지 북미와 유럽, 아시아 내의 50만km 도로에 대해 실측 조사 수준의 지상 지도를 제공할 예정이다. 이 지도는 수백만 대의 승용차로 지속적으로 업데이트되고 확장된다. 엔비디아 드라이브 맵은 자율주행 자동차 업계 전반에서 이용 가능하다.
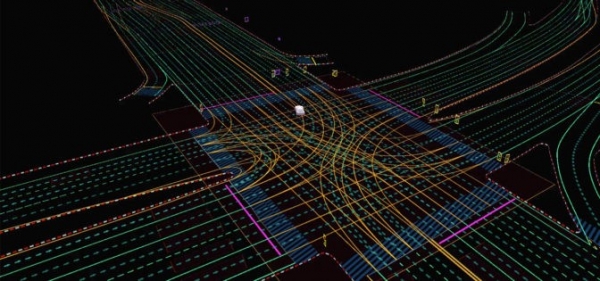
드라이브 맵에는 카메라, 레이더, 라이다 모달리티로 사용할 수 있는 여러 위치식별(localization) 레이어가 포함됐다. 드라이브 맵은 지도의 각 레이어에 따라 독립적으로 위치 식별을 할 수 있어 최고 수준의 자율성에 필요한 다양성과 다중성을 제공한다. 카메라 위치식별 레이어는 차선 구분선, 도로 표시, 도로 경계, 신호등, 표지판과 기둥과 같은 지도 속성으로 구성된다.
KIPOST
edit@kipost.net