하드웨어·소프트웨어 기술력으로 기존 대비 3분의1 가격 이동형측량시스템(MMS) 개발
자율주행 생태계에서 누구보다 주목받는 건 스타트업이다. 스타트업은 자율주행 생태계에 있는 주체 중 유일하게 혁신을 자유롭게 할 수 있고, 투자금을 쏟아부어 원하는 기술을 개발할 수 있다.
미국에만 쓸만한 자율주행 스타트업이 있는 건 아니다. 이 연재물에서는 이들과 어깨를 견줄만한 국내 스타트업들을 소개한다.
[스타트업으로 자율주행 만들기] ①정밀 지도-스트리스(Stryx)
스트리스(대표 박일석)는 자율주행차에 필요한 정밀(HD·High Definition) 지도와 이동형측량시스템(MMS)을 만드는 스타트업이다. 올해로 3년차지만, 네이버의 제주도 ‘거리뷰(Street view)’, SK텔레콤의 5G 기반 자율주행차량용 MMS 및 정밀 지도 등을 납품한 실력있는 업체다.
왜 정밀 지도인가

우리가 목적지로 가는 경로를 정할 때 지도나 내비게이션을 보듯, 자율주행차는 ‘정밀 지도’를 보면서 주행을 한다.
이 정밀 지도는 경로를 탐색할뿐만 아니라 주변 환경까지 분석한다. 현재 자율주행차에 쓰이는 카메라·레이더(Radar)·라이다(LiDAR)·초음파센서는 길어봤자 250m 이내의 주변 환경만 분석할 수 있다.
아무리 성능이 좋은 센서라도 상황에 따라 인식 거리가 급감하기도 하며, 무엇보다도 이 모든 센서에서 나오는 데이터를 실시간으로 처리하기가 쉽지 않다. 같은 원리로 정밀 지도는 복잡한 건물을 짓는 공사장, 사람이 들어갈 수 없는 지하 하수도 등의 지도를 그릴 때도 쓰인다.
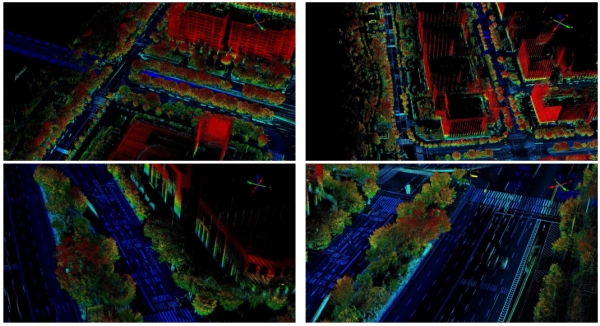
정밀 지도는 시스템에 필요한 3차원(3D) 도로 환경 정보를 10~20㎝의 정확도로 제공한다. 이 도로 환경 정보에는 차선 정보, 가드레일, 신호등·표지판의 위치 등이 포함돼 굳이 센서로 매번 이를 분석할 필요가 없게 해준다.
자율주행용 정밀 지도는 특수 장비인 MMS가 장착된 차량으로 일일이 골목골목을 다니며 만든다. 그렇다보니 1만km 구간에 대한 정밀 지도 하나를 만들려면 차량 10대로도 6~7개월이 걸린다. 측정 장비 자체도 대당 수억원에서 수십억원을 호가할 정도로 비싸다.
최대의 강점, 비용 절감
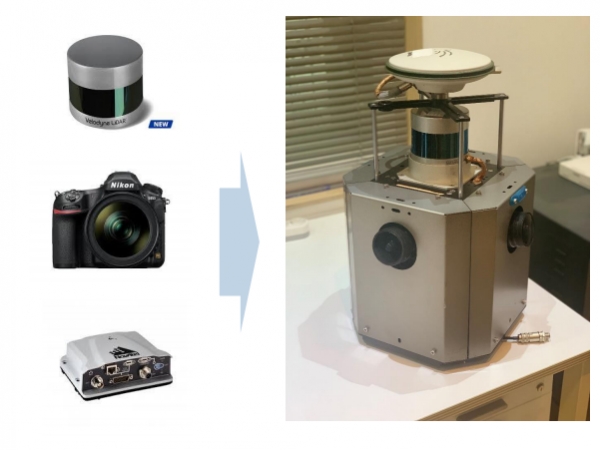
스트리스는 하드웨어 엔지니어링 역량과 소프트웨어 보정 알고리즘 역량을 결합, 성능은 유지하면서도 장비 비용은 기존 3분의1 수준으로 낮춘 ‘거리뷰 이동형 측량 시스템(sMMS)’을 개발했다.
MMS에는 고정밀 위성항법장치(GNSS)/관성항법장치(INS), 360도 카메라, 라이다 등이 장착된다. 차량이 이동하면 각 장치가 이미지 등의 데이터를 만들고, 후처리를 거쳐 이를 하나로 합쳐 정밀 지도를 만든다.
문제는 각 장치의 동기화 주기가 서로 달라 일일이 이를 손봐야했고, 정밀도를 높이기도 어려웠다는 점이다.
예를 들어 보통 산업용 플레어 카메라는 50~100ms 주기로, 라이다는 수 ms 주기로 동작한다. 차량이 100km/h 속도로 달린다고 가정하면 카메라는 3m 이동할 때마다 한 번씩, 라이다는 3㎝ 동작할 때마다 한 번씩 데이터를 만들어낸다는 얘기다. 일일이 수작업으로 같은 공간에서 나온 두 개의 데이터를 결합하기란 쉽지 않다.
스트리스는 동작 주기를 동기화하기 위해 카메라를 새로 만들었다. 업계에서 많이 활용하는 플리어 카메라 대신 DSLR 카메라를 손봐 동작 주기를 1~3ms 수준으로 줄였다. 어안 렌즈의 영상 왜곡 현상도 잡았다.
GNSS/INS 시스템도 기본 7000만원 이상인 광섬유 자이로(FOG) 방식이 아닌, 저렴한 미세전자기계시스템(MEMS)을 택했다. MEMS는 FOG 방식보다 진동 같은 잡음에 취약하고 정밀도가 10배 이상 떨어지지만, 스트리스는 물리적으로 진동을 억제할 수 있게 하드웨어를 별도로 개발했다.
그리고 보정(Calibration) 알고리즘을 활용, 각 장치에서 발생하는 오차를 최소화했다. 이를 통해 동기화 주기 10ms, 정확도 25㎝(1픽셀 미만), 최고 해상도 13K, 오차각 0.02º인 sMMS를 만들 수 있었다. 성능만 따지자면 구글의 MMS와 비슷한 수준이다.
특히 IT 인력이 주축인 다른 스타트업과 달리 측량을 연구하던 토목학도들이 주축이 돼 창업한 업체라 ‘측량’에 최적화한 시스템을 개발할 수 있었다고 회사는 설명했다.
박일석 스트리스 대표는 “sMMS의 가격을 기존보다 크게 낮출 수 있었던 건 우리가 하드웨어와 소프트웨어 역량을 모두 갖췄기 때문”이라며 “하드웨어를 자체 개발하면서 후보정을 위해 각 장치의 데이터를 일일이 손봐야하는 번거로움도 사라졌고, 소프트웨어는 별도 추가 보정이 필요 없을 정도”라고 설명했다.
미래는, 실시간으로 업데이트되는 정밀 지도
도로 환경은 계절·날씨에 따라 바뀌고 공사, 사고, 도로 노후화 등에도 영향을 받는다. 아무리 정밀 지도를 자주 만든다 해도 방대한 도로 정보를 모두 최신으로 유지하는 덴 한계가 있다.
가장 이상적인 솔루션은 내비게이션만큼 실시간으로 업데이트되는 정밀 지도다. 자율주행을 개발하고 있는 모든 업체들이 필요로 하는 기능으로, 창업 초부터 지금까지 스트리스의 목표 또한 이것이었다.
이를 구현하려면 MMS의 가격도 싸져야 하고, 실시간으로 업데이트할 수 있는 클라우드 기반 환경도 갖춰져야한다. 스트리스는 이미 장비 가격을 낮추는 기반 기술을 확보했고 자체 클라우드도 가지고 있다.
박 대표는 “MMS 내 2.5D 영상에서 나오는 신호등, 간판 등의 정보를 라이다의 좌표값과 매칭, 실시간으로 클라우드에 보내서 HD맵이 자동으로 업데이트되는 방식으로 이를 개발하고 있다”고 설명했다.
하지만 현실적으로 당장 MMS 가격을 모든 차량에 탑재할 수 있을만큼 낮추는 건 쉽지 않다. 이에 스트리스는 비전 기반 지도 시스템과 산업용 MMS(IMMS), 깊이 지도(Depth)까지를 만들 수 있는 측정 시스템을 별도 개발, 이를 통해 데이터를 실시간으로 업데이트하겠다는 계획을 세웠다.
비전 기반 지도 측정 시스템은 킥보드 등 저가형 이동체에 실을 수 있을 정도로 저렴하고, IMMS와 뎁스 지도 측정 시스템 또한 정밀 지도용 MMS보다 저렴해 택시 등 일반 승용차에도 적용할 수 있다고 박 대표는 설명했다.
그는 “대부분의 자율주행 개발 업체들은 지도제작 업체에 천문학적인 돈을 지불하고 데이터를 구매하지만, 업데이트 주기나 촬영 지역, 데이터의 질을 원하는 대로 조정할 수 없다는 문제를 갖고 있다”며 “우리의 솔루션은 이같은 어려움을 해소할 수 있다”고 말했다.