자율주행차가 주행을 판단하려면 가장 먼저 차량의 정확한 위치를 파악해야한다. 이 역할을 하는 게 위성측위시스템(GNSS)이다.
하지만 현재 차량에 탑재된 GNSS는 차량의 대략적인 위치만 파악할 수 있을 뿐이다. 자율주행 기술을 구현하려면 최소한 차량이 어느 차선에 있는지 알아야 한다. 이를 알아낼 수 있는 GNSS 모듈이 나왔다.
유블럭스(지사장 손광수)는 관성 센서가 내장된 고정밀 멀티밴드 GNSS 모듈 ‘ZED-F9K’를 출시했다고 23일 밝혔다.
‘ZED-F9K’는 유블럭스의 9세대 GNSS 플랫폼 ‘F9’을 기반으로 한다. 차세대 첨단운전지원시스템(ADAS) 등 자율주행 기술에 최적화됐다. 기존 표준 정밀 솔루션과 비교할 때 포지셔닝 성능이 10배 정도 향상돼 수 초만에 수십 센티미터 수준의 정밀도로 차량의 위치를 제공한다.
8세대 GNSS 플랫폼은 단일 대역만 활용하지만, 이 제품은 L1, L2, L5 등 모든 궤도의 GNSS 위성으로부터 신호를 수신한다. 수많은 가시 위성을 활용, 장애물 등으로 위성 신호가 부분적으로 차단되더라도 빠르게 위치를 추적할 수 있다.
모듈 내 관성 센서는 이동 중인 차량의 궤적 변화를 지속적으로 관찰하는 역할을 한다. 주차장, 터널 등 위성 신호 일부나 전체가 단절되더라도 차선 구분이 가능한 수준으로 정확도를 유지할 수 있다. 위성 신호가 다시 들어오면 관성 센서 데이터와 GNSS 신호를 더해 위치를 빠르게 알아낼 수 있게 했다.
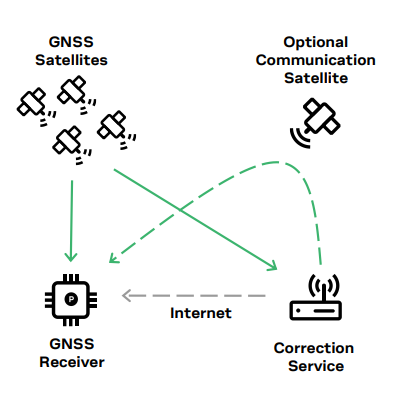
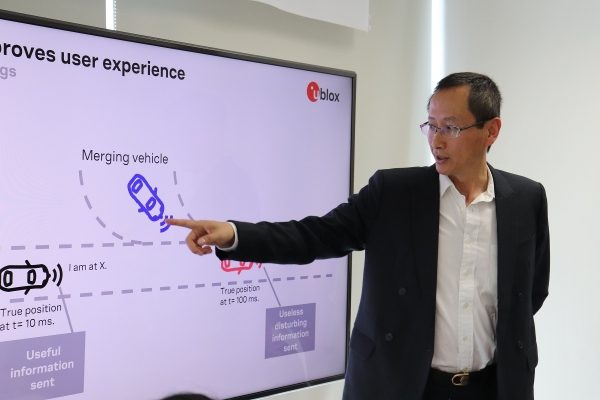
보통 활용하는 대역이 늘어나면 알고리즘이 복잡해지고 지연시간이 길어지는데 이 솔루션은 GNSS 위성의 여러 신호를 GNSS 보정 서비스(Correction Service)에 보내 전리층 및 기타 오차를 보정하는 방식으로 정확도와 지연시간이라는 두 마리 토끼를 동시에 잡았다.
완성차(OEM) 업체들이 요구하는 대차량통신(V2X) 시스템의 지연시간은 100㎳ 내외다. GNSS 모듈의 지연시간을 줄여야 GNSS 신호를 활용하는 다른 부품의 동작 시간을 앞당길 수 있다. ‘ZED-F9K’의 지연시간은 20~30㎳ 정도로, 터널 등 신호가 완전히 차단됐다가 다시 회복되는데는 2초 정도 걸린다.
이같은 정밀도를 가진 GNSS 솔루션이 없는 건 아니다. 하지만 가격이 1만5000달러(약 1788만원)에 달할 정도로 비싸 양산 차량에 탑재하기 어렵다. ‘ZED-F9K’는 대량 양산이 가능할 정도로 저렴한 솔루션이다.
유블럭스는 1년여 전부터 국내외 완성차 업체와 1차 협력사(Tier1)들에게 자사의 제품을 공급, 성능을 인정받았다.
알렉스 기(Alex Ngi) 유블럭스 GNSS 제품 담당 수석은 “ZED-F9K는 현재와 미래의 커넥티드 카의 요구를 충족시키는 턴키 방식의 고정밀 GNSS 솔루션”이라며 “고객의 제품 개발 사이클 전반에 걸쳐 탁월한 성능을 보장할 수 있다”고 말했다.